从春晚舞台上的武术表演,到实验室里的连续后空翻,人形机器人的运动能力正实现“破次元壁”的跃迁。近日,一套全新的通用运动控制策略正式亮相,成功让人形机器人流畅掌握后空翻、霹雳舞等多种高动态动作,在真实场景测试中,各类动作的完成准确率稳定超过90%,打破了传统机器人多动作控制精度不足的困境。
长期以来,让机器人灵活完成多样化高难度动作一直是行业难题。传统训练模式中,科研人员需为每个动作单独调参、反复训练,不仅效率低下,还容易出现“学了新动作忘旧动作”的问题,一旦动作种类增多,控制精度便会大幅下降。这套全新策略的核心突破,在于采用“生成式模型+强化学习”的两阶段训练机制,无需针对单个动作单独优化,就能让机器人掌握一整类极限运动能力。
策略的第一阶段的核心是“融合专家能力”。科研团队先为后空翻、托马斯全旋、霹雳舞基础动作等训练多个“专家策略”,再借助生成式建模技术,将这些分散的动作能力融合为统一策略。这就像让机器人先模仿多位顶级舞者的动作精髓,再通过算法整合,形成一套可灵活切换、适配多种动作的基础能力,摆脱了传统训练中“动作越多、精度越低”的瓶颈。
第二阶段则重点解决“仿真到真实”的落地难题。很多机器人在虚拟仿真环境中能完美完成高难度动作,但部署到真实场景时,常会因电机扭矩、制动功率等物理因素导致失败。为此,科研团队在强化学习过程中,精准融入电机扭矩—速度关系、电池能量传递、执行器物理模拟等真实环境因素,还加入了功率安全驱动正则化,避免机器人在高动态动作中出现过流、宕机等问题。
经过多轮测试,这套策略在真实人形机器人上展现出极强的稳定性和精准度。在157次物理测试中,整体动作完成成功率达91.08%,其中后空翻类动作成功率高达96.36%,霹雳舞类动作成功率也达到86.36%。机器人不仅能流畅完成连续后空翻、霹雳舞连贯动作,落地时的误差可控制在厘米级,动作流畅度堪比人类舞者。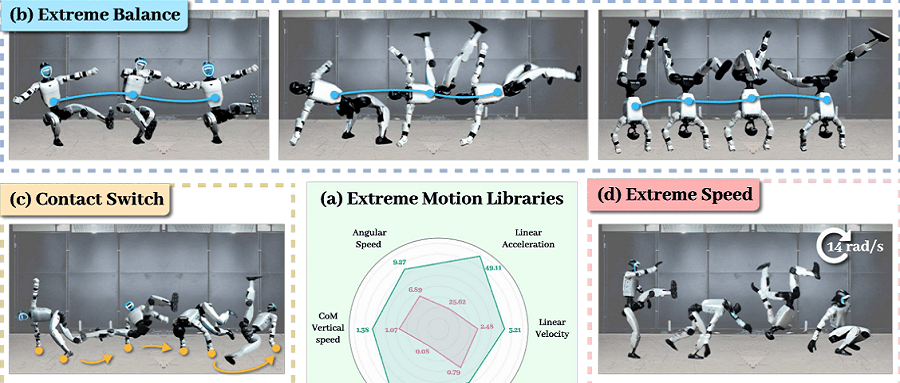
这套策略的突破,不仅让机器人实现了“炫技”般的动作升级,更具有重要的实用价值。业内专家表示,能完成后空翻、霹雳舞等极限动作,意味着机器人的运动控制能力达到了新高度,其背后的精准控制技术可迁移到工业作业、服务场景中,让机器人能更灵活地应对复杂任务。未来,随着策略的不断优化,人形机器人有望在更多领域实现突破,真正走进人们的生产生活。




